多軸触覚センサの基本構造
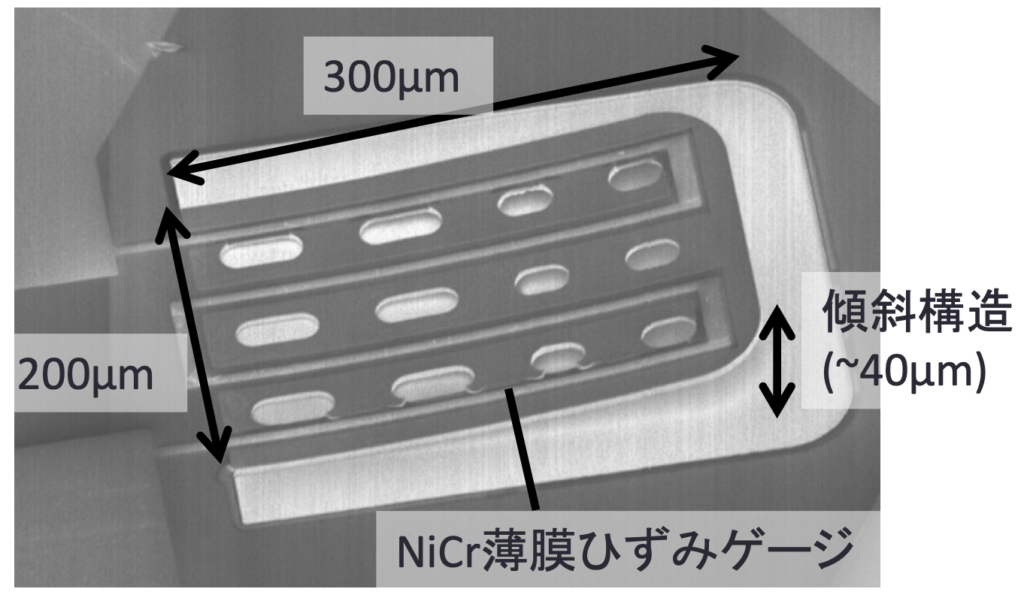
右図に示すように、SI(シリコン)の基板の上にセンサの中に大きさ0.3mm程度の微小なMEMSカンチレバー構造を複数個作っています。
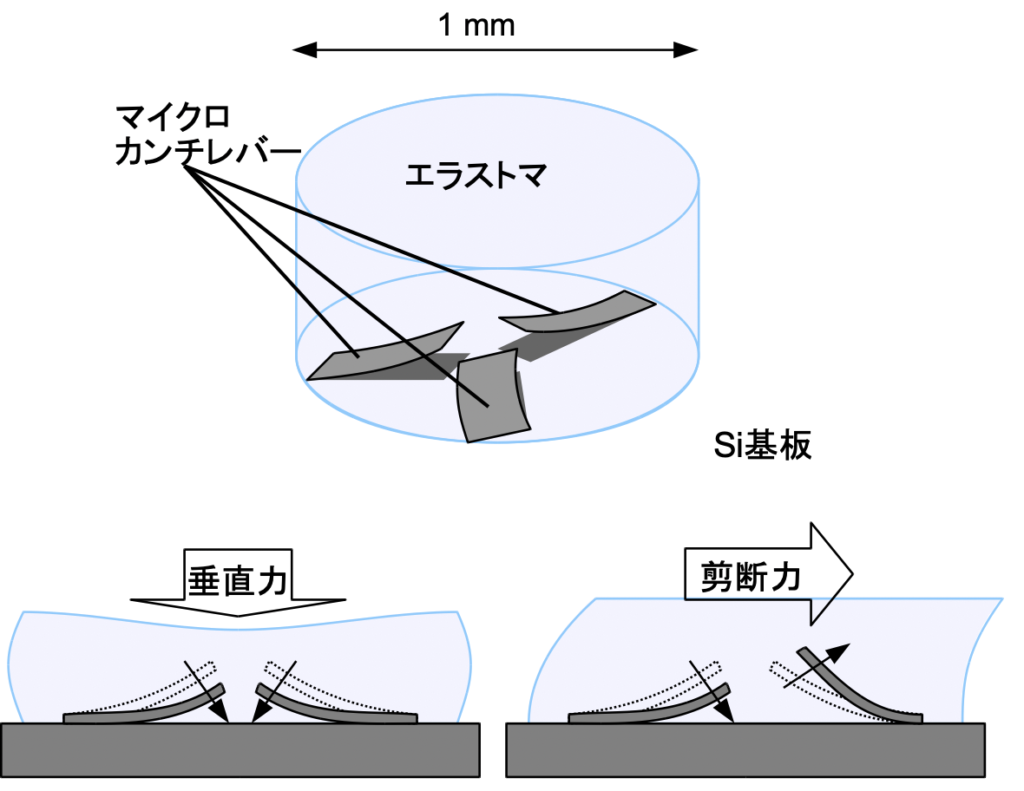
複数のMEMSカンチレバー構造をエラストマ(弾性材料)に埋め込み、エラストマの変形をMEMS構造の変形として検知します。エラストマに垂直力と剪断力を印加した際に、それぞれのMEMS構造の変形が異なるので、検知信号から、垂直力と剪断力を同時に検出できます。
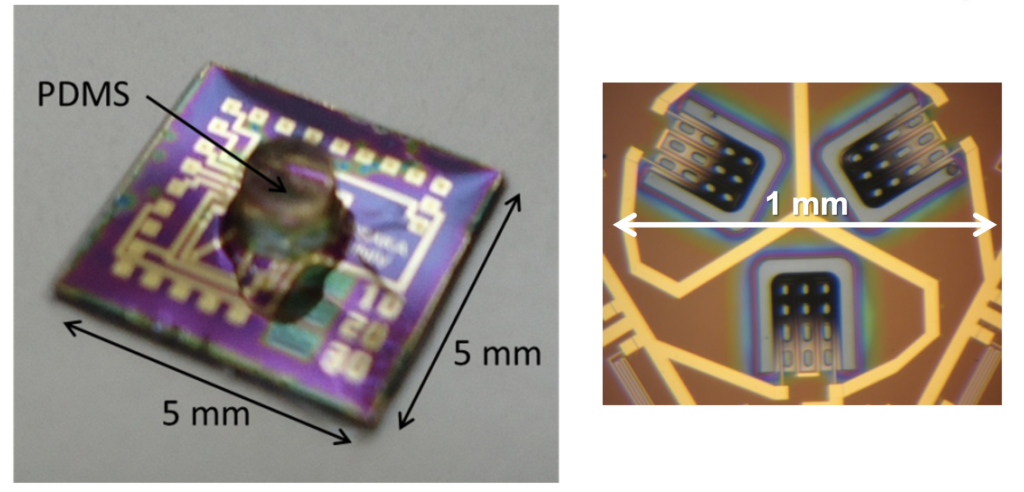
触覚センサ
これが開発した触覚センサチップです。検知部の大きさは約1mmで、配線等を含めたチップ全体の大きさは5mmと小さく、ロボットの指先等にも配置可能な大きさです。
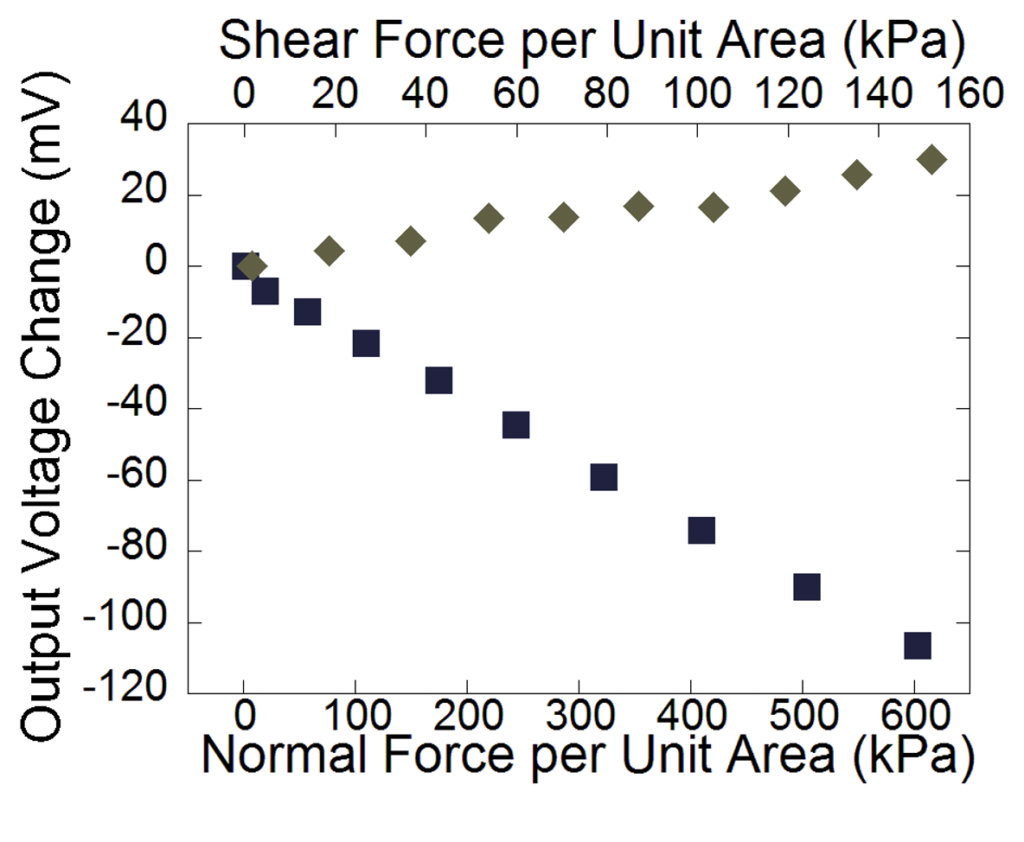
触覚センサに垂直力および剪断力を印加した時の出力電圧を図4に示します。垂直力、剪断力いずれに対しても線形な出力が得られました。
近接検出機能

本触覚センサの構造の一部を応用し、センサに対象物が触れる前の近接検知を可能としました。触覚センサとして機能する場合には、MEMS構造に組み込まれているひずみゲージ抵抗がカンチレバーの傾きの変化を検知します。一方、近接計測の場合には、入射光による光導電効果により、電極部の下にあるSi空乏層の静電容量が変化します。
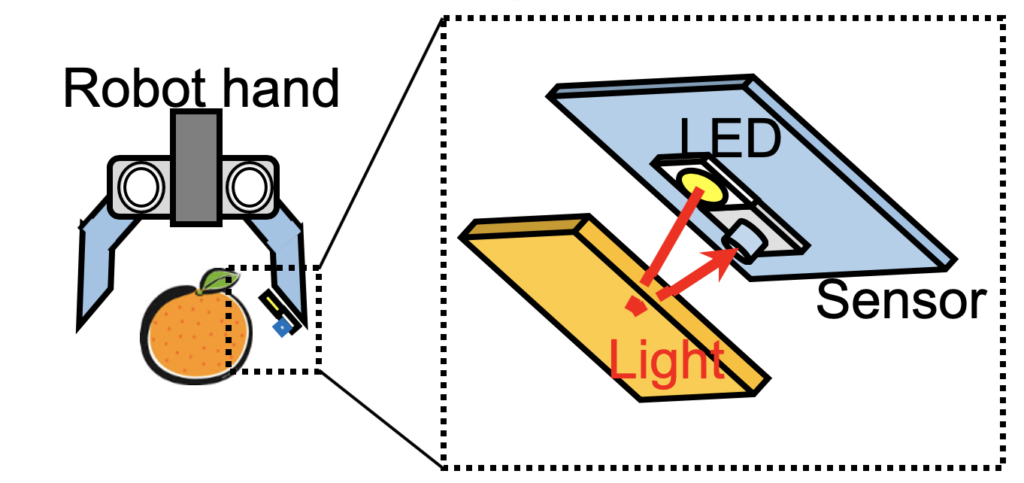
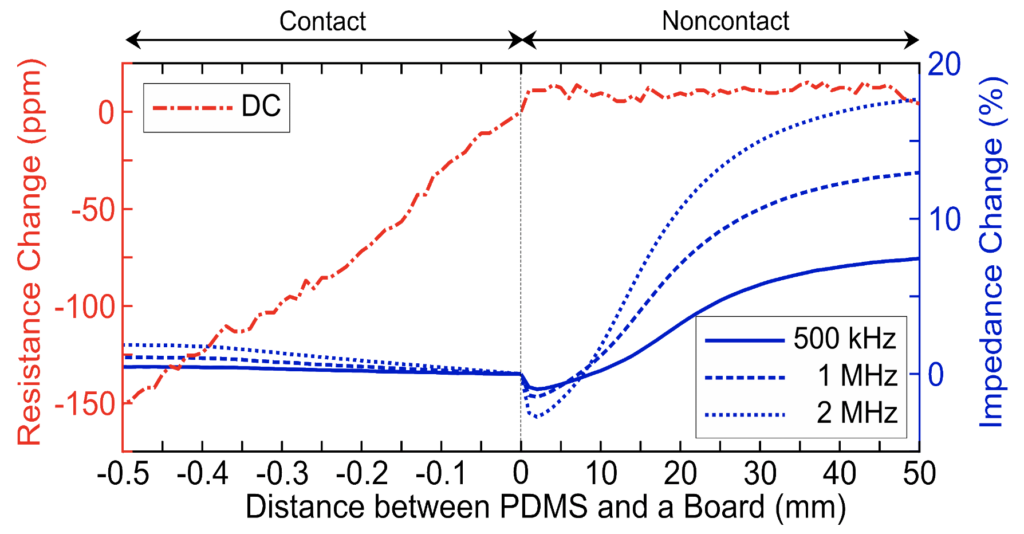
この効果を応用し、図のようにセンサ近傍に光源を設置し、物体の接近に伴う反射光の変化から物体までの距離を計測できます。下に接触までの距離センサでの距離計測結果(青線、グラフ右側)と接触後の触覚センサによる圧力の変化(赤線、グラフ左側)の計測結果を示します。
触覚センサ付きグリッパによるトマトの把持の例
従来の産業用ロボットのような位置制御だけでは、設定値より大きなトマトは潰してしまいます。触覚センサを使ったグリッパでは指先の接触状態に応じてグリッパの位置を調節するので、トマトを潰すこと無く把持できます。